Biography
Liyang Wang is a senior supervisor R&D engineer at COMAC Beijing Aircraft Technology Research Institute AI lab. His research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design. His current main research project is flight Four-Dimensional trajectory planning under multiple constraints and optimization objectives. At the same time, he leads the Flight Management System (FMS) group, which develops navigation and guidance module.
- Robotics
- Autonomous Driving
- Reinforcement Learning
- Deep Learning
- Planning and Control
PhD in Mechanical and Aerospace Engineering, 2019
Rutgers, The State University of New Jersey
MEng in Electronic Communication Engineering, 2015
University of Chinese Academy of Sciences
BSc in Electronic Engineering, 2012
Beihang University
Skills
Experience
Responsibilities include:
- Supervising team members for Navigation and Guidance module development within FMS (flight management system)
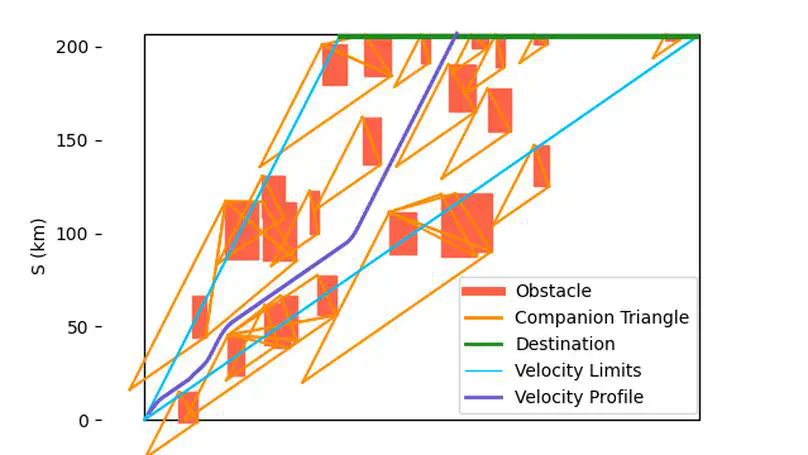
- Conducting research for 4D trajectory planning under multiple constraints and optimization objectives
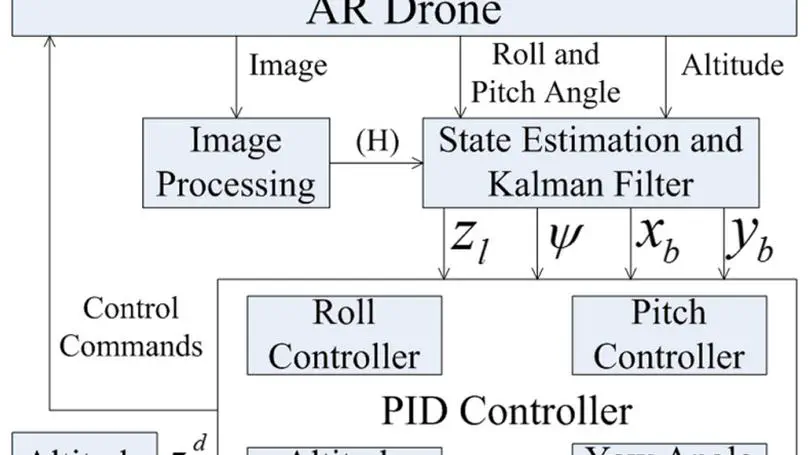
- Conducting research for wheeled robot autonomous driving to support aircraft taxiing
- Tracking SOTA AI algorithms and architectures
Responsibilities include:
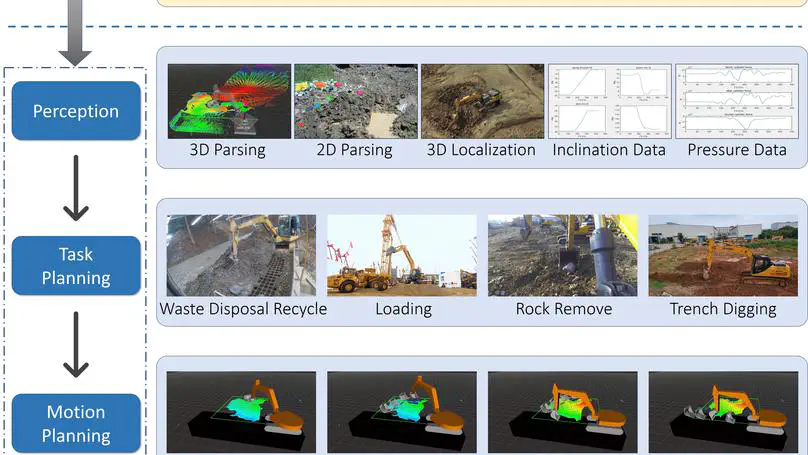
- Developing excavator autonomous driving
- Conducting research for motion planning and trajectory optimization
- Modelling and control of hydraulic system
- Developing robot hardware platform
- Delivering excavator autonomous solutions to customers
Projects