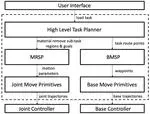
This project involves a wide range of technologies. My research and works on this has three directions, excavator arm motion planning, trajectory optimization, and control, crawler excavator base motion planning and control, and task-level planning involving decision-making.
To better support this project, besides my research and implementation, I have also developed a soil kinematic simulation based on ROS, and built a excavator robot system by modifying a mini-excavator, add sensors and make computer directly gives control commands, instead of using a joystick.
(The slides were written in Chinese.)
Liyang Wang
Senior Supervisor R&D Engineer
My research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design.