Liyang Wang's Academic Page
Liyang Wang's Academic Page
Home
Projects
Publications
Contact
Light
Dark
Automatic
article-journal
An autonomous excavator system for material loading tasks
This paper introduces an Autonomous Excavator System (AES) designed for material loading tasks in challenging environments. Combining advanced perception and planning algorithms, AES demonstrates autonomous operation with efficiency comparable to human operators and robust performance in complex scenarios, achieving 24-hour continuous operation without human intervention.
Liangjun Zhang
,
Jinxin Zhao
,
Pinxin Long
,
Liyang Wang
,
Lingfeng Qian
,
Feixiang Lu
,
Xibin Song
,
Dinesh Manocha
PDF
Cite
Project
Video
Aes: Autonomous excavator system for real-world and hazardous environments
This paper emphasizes the potential of autonomous excavators to enhance safety and productivity by replacing human operators in hazardous conditions within a multi-billion-dollar global market.
Jinxin Zhao
,
Pinxin Long
,
Liyang Wang
,
Lingfeng Qian
,
Feixiang Lu
,
Xibin Song
,
Dinesh Manocha
,
Liangjun Zhang
PDF
Cite
Project
Video
A K Nearest neighborhood-based wind estimation for rotary-wing VTOL UAVs
This paper presents a K Nearest Neighborhood learning-based method for wind speed estimation in vertical take-off and landing UAVs. It offers robust and accurate wind estimation without the need for detailed aerodynamic information, addressing challenges posed by rotor down-wash effects.
Liyang Wang
,
Gaurav Misra
,
Xiaoli Bai
PDF
Cite
Quadrotor Autonomous Approaching and Landing on a Vessel Deck
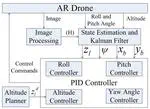
This paper presents a monocular vision-based solution for autonomous quadrotor UAV landing on a vessel deck under challenging sea conditions, using on-board sensors only. Experimental results with a Parrot AR.Drone platform confirm the solution’s accuracy and robustness.
Liyang Wang
,
Xiaoli Bai
PDF
Cite
Slides
Video
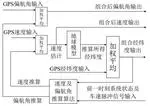
New method of GPS/DR data fusion for land vehicle
A new Dead Reckoning (DR) navigation algorithm based on speed pulse for land vehicles provides real-time latitude and longitude calculations, while a robust GPS/DR integrated navigation data fusion method improves precision and works effectively even in GPS signal-interfered environments.
Liyang Wang
,
Wentao He
,
Chengyan Ma
,
Xiaoli Bai
PDF
Cite
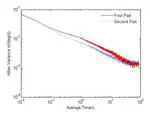
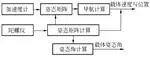
Real-time filtering method for low-cost MEMS gyroscope
This work presents a method to mitigate stochastic errors in low-cost MEMS gyroscopes using Allan variance analysis, real-time averaging, least square extrapolation, and a Kalman filter. The method effectively reduces errors, compensates for constant drift, and minimizes measurement variance, making it suitable for various MEMS gyroscopes in static and dynamic scenarios.
Liyang Wang
,
Kunpeng Zhai
,
Wentao He
,
Chengyan Ma
PDF
Cite
Application of Fourth-order Runge-Kutta algorithm in SINS
This research introduces a fourth-order Runge-Kutta algorithm to enhance the accuracy and performance of Strapdown Inertial Navigation System (SINS) calculations compared to traditional high-accuracy digital integration methods.
Liyang Wang
,
Kunpeng Zhai
,
Wentao He
,
Jianhua Xu
PDF
Cite
Cite
×