Liyang Wang's Academic Page
Liyang Wang's Academic Page
Home
Projects
Publications
Contact
Light
Dark
Automatic
paper-conference
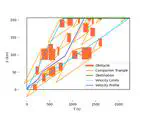
Velocity Planning with Multi-Objectives in Displacement-Time Graphs Using Deep Reinforcement Learning
This paper presents a robust velocity planning method for robotics and autonomous vehicles using deep reinforcement learning, offering scene-independent, efficient, and comfortable performance.
Liyang Wang
,
Murat BRONZ
Project
Video
Excavation of fragmented rocks with multi-modal model-based reinforcement learning
This paper presents a multi-modal model-based reinforcement learning approach for excavating challenging fragmented rocks. It leverages a multi-modal recurrent neural network (RNN) and a model predictive controller (MPC) to outperform conventional strategies, demonstrating superior predictive accuracy and effectiveness in a challenging task.
Yifan Zhu
,
Liyang Wang
,
Liangjun Zhang
PDF
Cite
Project
Slides
Imitation Learning and Model Integrated Excavator Trajectory Planning
This paper presents a two-stage approach that integrates data-driven imitation learning and model-based trajectory optimization to enhance automated excavation techniques for excavators, resulting in a significant increase in excavation efficiency.
Qiangqiang Guo
,
Zhixian Ye
,
Liyang Wang
,
Liangjun Zhang
PDF
Cite
Project
Autonomous Wheel Loader Trajectory Tracking Control Using LPV-MPC
This paper outlines an approach for efficient trajectory tracking control of autonomous wheel loaders, employing nonlinear model predictive control for trajectory planning and a Linear Parameter Varying (LPV) model for enhanced computational efficiency, leading to better performance and reduced computational burden compared to conventional methods.
Ruitao Song
,
Zhixian Ye
,
Liyang Wang
,
Tianyi He
,
Liangjun Zhang
PDF
Cite
Project
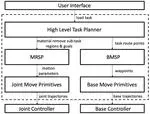
Hierarchical planning for autonomous excavator on material loading tasks
This paper presents a hierarchical planning system for autonomous excavators, enhancing task and motion planning, and demonstrating its effectiveness in real-world and simulated excavation tasks.
Liyang Wang
,
Zhixian Ye
,
Liangjun Zhang
PDF
Cite
Project
NavDog: Robotic Navigation Guide Dog via Model Predictive Control and Human-Robot Modeling
This paper introduces a robot guide dog system designed to assist vision-impaired individuals in navigating environments. Using a novel human-robot kinematic model and a Model Predictive Control (MPC) algorithm, this wheeled ground robot can successfully guide users through narrow corridors, avoiding obstacles and enhancing their mobility.
Liyang Wang
,
Jinxin Zhao
,
Liangjun Zhang
PDF
Cite
Project
Slides
Video
Cite
×