Abstract
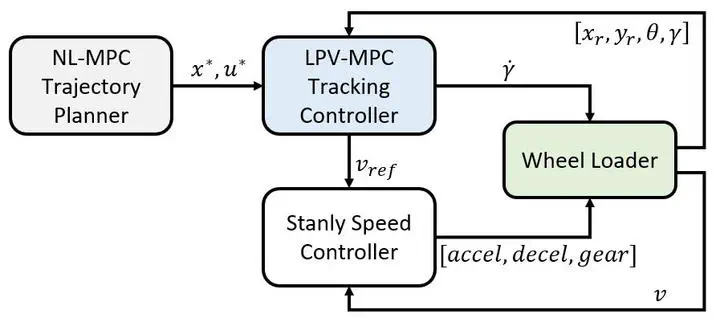
In this paper, we present a systematic approach for high-performance and efficient trajectory tracking control of autonomous wheel loaders. With the nonlinear dynamic model of a wheel loader, nonlinear model predictive control (MPC) is used in offline trajectory planning to obtain a high-performance state-control trajectory while satisfying the state and control constraints. In tracking control, the nonlinear model is embedded into a Linear Parameter Varying (LPV) model and the LPV-MPC strategy is used to achieve fast online computation and good tracking performance. To demonstrate the effectiveness and the advantages of the LPV-MPC, we test and compare three model predictive control strategies in the high-fidelity simulation environment. With the planned trajectory, three tracking control strategies LPV-MPC, nonlinear MPC, and LTI-MPC are simulated and compared in the perspectives of computational burden and tracking performance. The LPV-MPC can achieve better performance than conventional LTI-MPC because more accurate nominal system dynamics are captured in the LPV model. In addition, LPV-MPC achieves slightly worse tracking performance but tremendously improved computational efficiency than nonlinear MPC.
Liyang Wang
Senior Supervisor R&D Engineer
My research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design.