Abstract
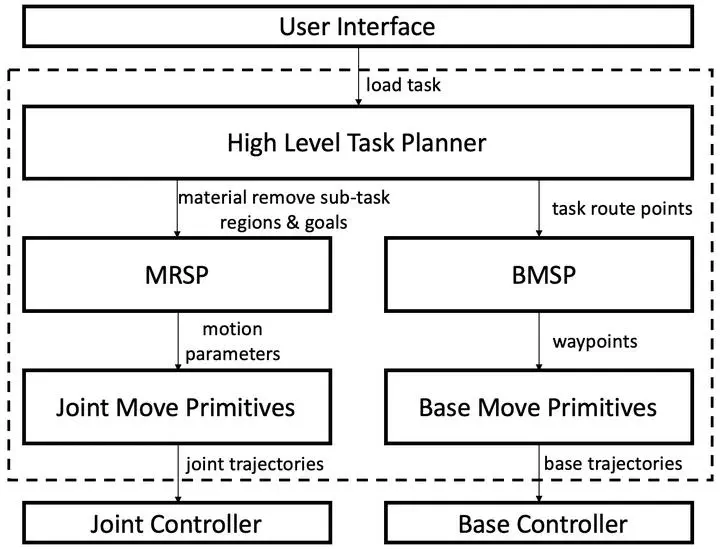
Autonomous excavator develops rapidly in recent years as a result of the shortage of labor and hazardous working environments for operating excavators. We present a novel hierarchical planning system for autonomous excavators. The overall planning system consists of a high-level task planner for task division and base movement planning, and general sub-task planners with motion primitives, which include both arm and base movement. Using the proposed system architecture, we experiment the trench and pile removal tasks in the real world and experiment large-scale material loading tasks in a simulation environment. The results show that the system architecture and planner algorithms are able to generate effective task and motion plans which perform well in autonomous excavation.
Liyang Wang
Senior Supervisor R&D Engineer
My research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design.