Abstract
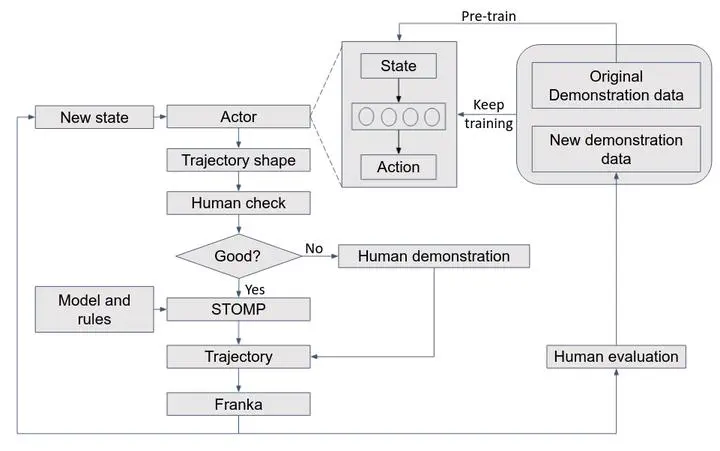
Automated excavation is promising to improve the safety and efficiency of excavators, and trajectory planning is one of the most important techniques. In this paper, we propose a two-stage method that integrates data-driven imitation learning and model-based trajectory optimization to generate optimal trajectories for autonomous excavators. We firstly train a deep neural network using demonstration data to mimic the operation patterns of human experts under various terrain states including their geometry shape and material type. Then, we use a stochastic trajectory optimization method to improve the trajectory generated by the neural network to guarantee kinematics feasibility, improve smoothness, satisfy hard constraints, and achieve desired excavation volumes. We test the proposed algorithm on a Franka robot arm equipped with a bucket end-effector. We further evaluate our method on different material types, such as sand and rigid blocks. The experimental results show that the proposed two-stage algorithm by combining expert knowledge and model optimization can increase the excavation weights by up to 24.77% meanwhile with low variance.
Liyang Wang
Senior Supervisor R&D Engineer
My research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design.