NavDog: Robotic Navigation Guide Dog via Model Predictive Control and Human-Robot Modeling
Abstract
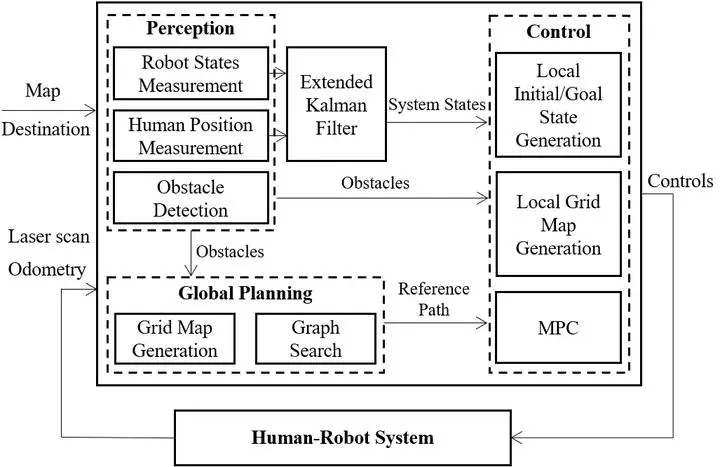
Guide dogs can vastly improve vision-impaired people’s daily-life quality by guiding them to destinations while avoiding obstacles. Animal guide dogs are costly for training. This paper presents a robot guide dog system to take a vision-impaired user to a destination while avoiding obstacles in the environment for both the user and the robot dog. A novel human-robot kinematic model and an MPC-based motion planning and control algorithm are proposed. We implement the method on a wheeled ground robot. All the sensors are mounted on the robot, and the human user does not have to take additional sensor devices. Simulation and real-world experiment results show that the proposed method can tackle challenging navigation tasks in narrow corridors for vision-impaired people.
Liyang Wang
Senior Supervisor R&D Engineer
My research interests include robotics, reinforcement learning, deep learning, path planning, motion planning, trajectory optimization, and controller design.