Liyang Wang's Academic Page
Liyang Wang's Academic Page
Home
Projects
Publications
Contact
Light
Dark
Automatic
All Publications
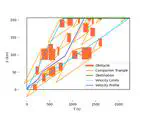
Velocity Planning with Multi-Objectives in Displacement-Time Graphs Using Deep Reinforcement Learning
This paper presents a robust velocity planning method for robotics and autonomous vehicles using deep reinforcement learning, offering scene-independent, efficient, and comfortable performance.
Liyang Wang
,
Murat BRONZ
Project
Video
Excavation of fragmented rocks with multi-modal model-based reinforcement learning
This paper presents a multi-modal model-based reinforcement learning approach for excavating challenging fragmented rocks. It leverages a multi-modal recurrent neural network (RNN) and a model predictive controller (MPC) to outperform conventional strategies, demonstrating superior predictive accuracy and effectiveness in a challenging task.
Yifan Zhu
,
Liyang Wang
,
Liangjun Zhang
PDF
Cite
Project
Slides
Imitation Learning and Model Integrated Excavator Trajectory Planning
This paper presents a two-stage approach that integrates data-driven imitation learning and model-based trajectory optimization to enhance automated excavation techniques for excavators, resulting in a significant increase in excavation efficiency.
Qiangqiang Guo
,
Zhixian Ye
,
Liyang Wang
,
Liangjun Zhang
PDF
Cite
Project
Autonomous Wheel Loader Trajectory Tracking Control Using LPV-MPC
This paper outlines an approach for efficient trajectory tracking control of autonomous wheel loaders, employing nonlinear model predictive control for trajectory planning and a Linear Parameter Varying (LPV) model for enhanced computational efficiency, leading to better performance and reduced computational burden compared to conventional methods.
Ruitao Song
,
Zhixian Ye
,
Liyang Wang
,
Tianyi He
,
Liangjun Zhang
PDF
Cite
Project
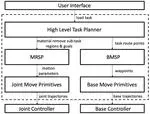
Hierarchical planning for autonomous excavator on material loading tasks
This paper presents a hierarchical planning system for autonomous excavators, enhancing task and motion planning, and demonstrating its effectiveness in real-world and simulated excavation tasks.
Liyang Wang
,
Zhixian Ye
,
Liangjun Zhang
PDF
Cite
Project
An autonomous excavator system for material loading tasks
This paper introduces an Autonomous Excavator System (AES) designed for material loading tasks in challenging environments. Combining advanced perception and planning algorithms, AES demonstrates autonomous operation with efficiency comparable to human operators and robust performance in complex scenarios, achieving 24-hour continuous operation without human intervention.
Liangjun Zhang
,
Jinxin Zhao
,
Pinxin Long
,
Liyang Wang
,
Lingfeng Qian
,
Feixiang Lu
,
Xibin Song
,
Dinesh Manocha
PDF
Cite
Project
Video
NavDog: Robotic Navigation Guide Dog via Model Predictive Control and Human-Robot Modeling
This paper introduces a robot guide dog system designed to assist vision-impaired individuals in navigating environments. Using a novel human-robot kinematic model and a Model Predictive Control (MPC) algorithm, this wheeled ground robot can successfully guide users through narrow corridors, avoiding obstacles and enhancing their mobility.
Liyang Wang
,
Jinxin Zhao
,
Liangjun Zhang
PDF
Cite
Project
Slides
Video
Aes: Autonomous excavator system for real-world and hazardous environments
This paper emphasizes the potential of autonomous excavators to enhance safety and productivity by replacing human operators in hazardous conditions within a multi-billion-dollar global market.
Jinxin Zhao
,
Pinxin Long
,
Liyang Wang
,
Lingfeng Qian
,
Feixiang Lu
,
Xibin Song
,
Dinesh Manocha
,
Liangjun Zhang
PDF
Cite
Project
Video
A K Nearest neighborhood-based wind estimation for rotary-wing VTOL UAVs
This paper presents a K Nearest Neighborhood learning-based method for wind speed estimation in vertical take-off and landing UAVs. It offers robust and accurate wind estimation without the need for detailed aerodynamic information, addressing challenges posed by rotor down-wash effects.
Liyang Wang
,
Gaurav Misra
,
Xiaoli Bai
PDF
Cite
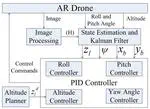
Quadrotor Autonomous Approaching and Landing on a Vessel Deck
This paper presents a monocular vision-based solution for autonomous quadrotor UAV landing on a vessel deck under challenging sea conditions, using on-board sensors only. Experimental results with a Parrot AR.Drone platform confirm the solution’s accuracy and robustness.
Liyang Wang
,
Xiaoli Bai
PDF
Cite
Slides
Video
»
Cite
×