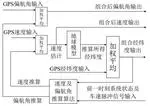
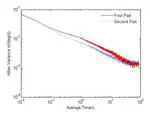
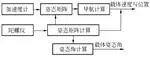
This work presents a method to mitigate stochastic errors in low-cost MEMS gyroscopes using Allan variance analysis, real-time averaging, least square extrapolation, and a Kalman filter. The method effectively reduces errors, compensates for constant drift, and minimizes measurement variance, making it suitable for various MEMS gyroscopes in static and dynamic scenarios.
Liyang Wang, Kunpeng Zhai, Wentao He, Chengyan Ma